
В кривошипно-ползунном механизме кривошип вращается с угловой скоростью . При заданных размерах O...: ответ на тест 64223 - Теоретическая механика
В кривошипно-ползунном механизме кривошип вращается с угловой скоростью  .
.
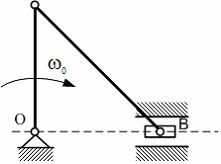
При заданных размерах OA = 10 см, AB = 20 см и вертикальном положении кривошипа скорость ползуна В равна …
.При заданных размерах OA = 10 см, AB = 20 см и вертикальном положении кривошипа скорость ползуна В равна …
Вопрос задал(а): Анонимный пользователь, 15 Декабрь 2015 в 15:59
На вопрос ответил(а): Любимов Павел, 15 Декабрь 2015 в 15:59
На вопрос ответил(а): Любимов Павел, 15 Декабрь 2015 в 15:59