
Состояния системы S где конечная точка характеризующееся двумя параметрами и представлено на рису...: ответ на тест 698717 - Математика
Состояния системы S, где  конечная точка, характеризующееся двумя параметрами
конечная точка, характеризующееся двумя параметрами  и
и  , представлено на рисунке:
, представлено на рисунке:
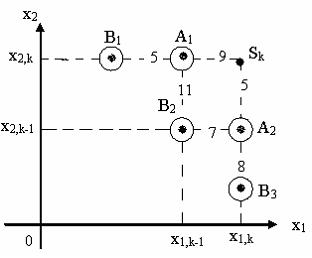
Числа на горизонтальных и вертикальных линиях - затраты при переходе системы из состояния в состояние
в состояние  (
( ) соответственно при движении только вдоль оси
) соответственно при движении только вдоль оси  и только
и только  . Тогда минимальные затраты на предпоследним
. Тогда минимальные затраты на предпоследним  шаге планирования методом динамического программирования, равны …
шаге планирования методом динамического программирования, равны …
конечная точка, характеризующееся двумя параметрами и , представлено на рисунке:Числа на горизонтальных и вертикальных линиях - затраты при переходе системы из состояния
в состояние () соответственно при движении только вдоль оси и только . Тогда минимальные затраты на предпоследним шаге планирования методом динамического программирования, равны …
Вопрос задал(а): Анонимный пользователь, 12 Ноябрь 2020 в 21:27
На вопрос ответил(а): Анастасия Степанова, 12 Ноябрь 2020 в 21:27
На вопрос ответил(а): Анастасия Степанова, 12 Ноябрь 2020 в 21:27