
Дифференциальное уравнение вынужденных колебаний механической системы с одной степенью свободы име...: ответ на тест 238852 - Теоретическая механика
Дифференциальное уравнение вынужденных колебаний механической системы с одной степенью свободы имеет вид:
 , (1)
, (1)где q – обобщенная координата системы.
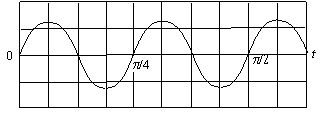
На рисунке изображен график . . .
Вопрос задал(а): Анонимный пользователь, 10 Ноябрь 2020 в 00:26
На вопрос ответил(а): Анастасия Степанова, 10 Ноябрь 2020 в 00:26
На вопрос ответил(а): Анастасия Степанова, 10 Ноябрь 2020 в 00:26