
Однородный диск радиуса R и массы m вращается относительно оси проходящей через его центр перпендику...: ответ на тест 160174 - Теоретическая механика
Однородный диск радиуса R и массы m вращается относительно оси, проходящей через его центр перпендикулярно его плоскости, с угловой скоростью  .
.
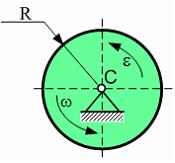
Кинетическая энергия диска равна …
.Кинетическая энергия диска равна …




Вопрос задал(а): Анонимный пользователь, 21 Октябрь 2018 в 18:53
На вопрос ответил(а): Бунакова Мария, 21 Октябрь 2018 в 18:54
На вопрос ответил(а): Бунакова Мария, 21 Октябрь 2018 в 18:54