
Движение точки M штанги B изучается относительно двух систем отсчета: неподвижной и подвижной неиз...: ответ на тест 658252 - Теоретическая механика
Движение точки M штанги B изучается относительно двух систем отсчета: неподвижной  и подвижной
и подвижной  , неизменно связанной с клином A. Штанга имеет вертикальные направляющие, а клин движется по горизонтальным направляющим по закону
, неизменно связанной с клином A. Штанга имеет вертикальные направляющие, а клин движется по горизонтальным направляющим по закону  . На рисунке справа построен многоугольник ускорений для точки М в соответствии с теоремой о сложении ускорений.
. На рисунке справа построен многоугольник ускорений для точки М в соответствии с теоремой о сложении ускорений.
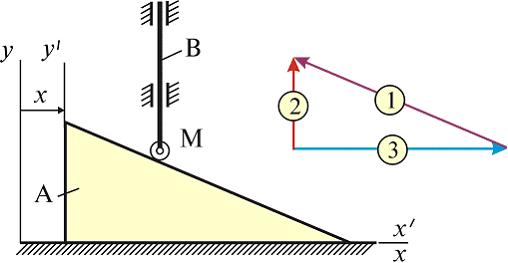
Вектор 2 — это …
и подвижной , неизменно связанной с клином A. Штанга имеет вертикальные направляющие, а клин движется по горизонтальным направляющим по закону . На рисунке справа построен многоугольник ускорений для точки М в соответствии с теоремой о сложении ускорений.Вектор 2 — это …
Вопрос задал(а): Анонимный пользователь, 12 Ноябрь 2020 в 20:43
На вопрос ответил(а): Анастасия Степанова, 12 Ноябрь 2020 в 20:43
На вопрос ответил(а): Анастасия Степанова, 12 Ноябрь 2020 в 20:43