
Кривошип OA вращающийся вокруг неподвижной оси O с угловой скоростью занимает в данный момент гориз...: ответ на тест 657179 - Теоретическая механика
Кривошип OA, вращающийся вокруг неподвижной оси O с угловой скоростью  , занимает в данный момент горизонтальное положение. Ползун B массы
, занимает в данный момент горизонтальное положение. Ползун B массы  перемещается по вертикальным направляющим. Длина кривошипа равна
перемещается по вертикальным направляющим. Длина кривошипа равна  , шатуна AB —
, шатуна AB —  .
.
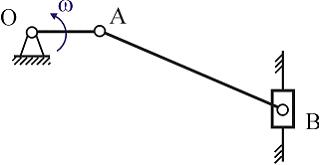
Модуль вектора количества движения ползуна равен …
, занимает в данный момент горизонтальное положение. Ползун B массы перемещается по вертикальным направляющим. Длина кривошипа равна , шатуна AB — .Модуль вектора количества движения ползуна равен …





Вопрос задал(а): Анонимный пользователь, 12 Ноябрь 2020 в 20:42
На вопрос ответил(а): Анастасия Степанова, 12 Ноябрь 2020 в 20:42
На вопрос ответил(а): Анастасия Степанова, 12 Ноябрь 2020 в 20:42