
Материальная точка массой движется под действием сил и . Проекция ускорения точки на ось Ox равна: ответ на тест 160175 - Теоретическая механика
Материальная точка массой  движется под действием сил
движется под действием сил  и
и  .
.
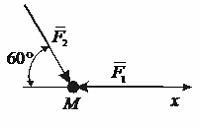
Проекция ускорения точки на ось Ox равна …
движется под действием сил и .Проекция ускорения точки на ось Ox равна …




Вопрос задал(а): Анонимный пользователь, 21 Октябрь 2018 в 19:56
На вопрос ответил(а): Астафьева Любовь, 21 Октябрь 2018 в 19:56
На вопрос ответил(а): Астафьева Любовь, 21 Октябрь 2018 в 19:56