
В кривошипно-кулисном механизме левый рисунок движение точки A изучается относительно двух систем от...: ответ на тест 322242 - Теоретическая механика
В кривошипно-кулисном механизме (левый рисунок) движение точки A изучается относительно двух систем отсчета: неподвижной  и подвижной
и подвижной  , неизменно связанной с кулисой OB. На рисунке справа построен треугольник скоростей для точки A в соответствии с теоремой о сложении скоростей
, неизменно связанной с кулисой OB. На рисунке справа построен треугольник скоростей для точки A в соответствии с теоремой о сложении скоростей  .
.
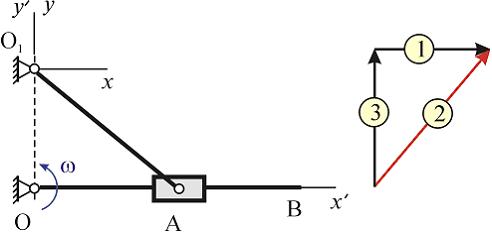
Приведите в соответствие номера векторов с их именами.
и подвижной , неизменно связанной с кулисой OB. На рисунке справа построен треугольник скоростей для точки A в соответствии с теоремой о сложении скоростей .Приведите в соответствие номера векторов с их именами.
Вопрос задал(а): Анонимный пользователь, 10 Ноябрь 2020 в 01:40
На вопрос ответил(а): Анастасия Степанова, 10 Ноябрь 2020 в 01:40
На вопрос ответил(а): Анастасия Степанова, 10 Ноябрь 2020 в 01:40