
Тело 1 массой m1=2 кг поднимается с постоянным ускорением а=2 м/с2 массой ступенчатого блока можно п...: ответ на тест 63342 - Теоретическая механика
Тело 1 массой m1=2 кг поднимается с постоянным ускорением а=2 м/с2, массой ступенчатого блока можно пренебречь, R=2r (g=10 м/с2).
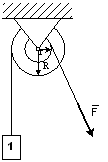
Тогда модуль силы F будет равен...
Тогда модуль силы F будет равен...
Вопрос задал(а): Анонимный пользователь, 14 Декабрь 2015 в 21:49
На вопрос ответил(а): Любимов Павел, 14 Декабрь 2015 в 22:40
На вопрос ответил(а): Любимов Павел, 14 Декабрь 2015 в 22:40